

 English
English  Spanish
Spanish  French
French  German
German 主轴控制
MASSO 提供0-10V 、 PWM和STEP/DIR控制信号来控制各种 VFD 和 DC 主轴、伺服或步进电机
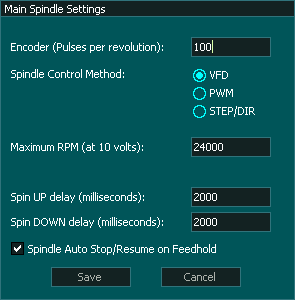
主轴设置窗口允许您选择主轴控制模式。此外,还可以添加Spin UP和Spin DOWN延迟值。主轴偏置值在主轴 ON 和主轴 OFF 命令时停止机器,以允许主轴达到所需的速度。

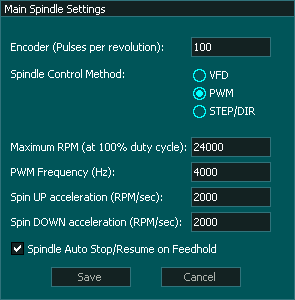
信息: MASSO 的 PWM 频率可设置在4 kHz至 65 kHz 之间。
INFO:在 PWM 模式下,MASSO 输出单极性 PWM信号。
变频驱动控制
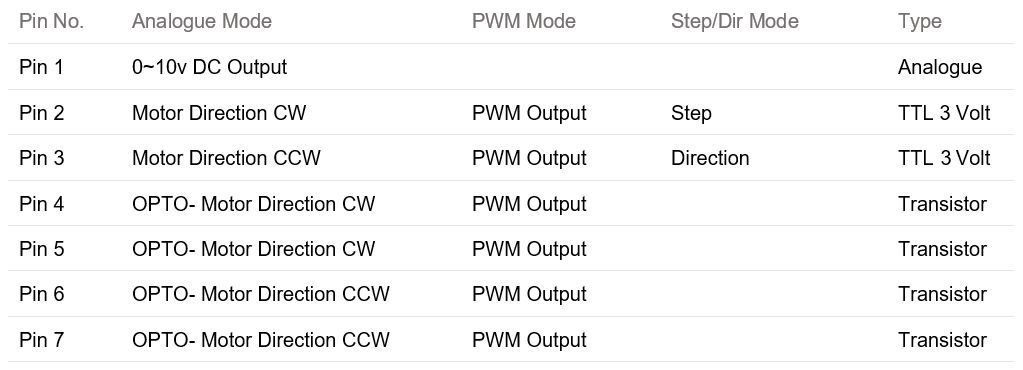
- 引脚 1 的控制引脚生成 0 至 10 伏的模拟电压,与所需速度成正比
- 主轴控制引脚 2 – 通常为低电平,当主轴设置为点动时变为高电平
- 引脚控制引脚 4 和 5 在引脚配置为通电时常开且导通
- 主轴控制引脚 3 - 通常为低电平,当主轴设置为反转时变为高电平
- 引脚控制引脚 6 和 7 常开,当引脚配置为反向时导通
脉宽调制控制
- 主轴驱动引脚 2 - 当主轴设置为进给时输出 PWM 信号
- 当引脚设置为正向时,主轴控制引脚 4 和 5 通过 PWM 信号切换打开和关闭
- 主轴控制引脚 3 - 主轴反转时输出 PWM 信号
- 当引脚设置为“Invert”时,引脚控制引脚 6 和 7 通过 PWM 信号打开和关闭。
- MASSO 的 PWM 频率可设置在4 kHz至65 kHz 之间。
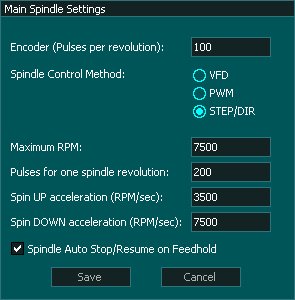
步骤/方向控制
使用步进电机或伺服电机作为主轴
- 步进和方向模式的输出是公共GND信号。
- 引脚 2 控制引脚:步进
- 引脚控制引脚 3:方向
- 当使用微步速度为 1 的 200 步进电机时,最小步进速度为每秒 500 个脉冲或 150 rpm。
- 最大脉冲速率:使用微步速率为 1 的 200 步进电机时,每秒 25,000 个脉冲或 7,500 rpm。
- 增加电机驱动器上的微步会降低最小和最大主轴速度。
- 如果要求的速度低于最低速度,则主轴以每秒 500 脉冲的最低速度运行。
- 如果要求的速度高于最大速度,主轴将以每秒25000脉冲的最大速度旋转。
进给保持时主轴自动停止/恢复
- 如果激活此选项,主轴将在进给保持时停止,如果按“循环开始”继续加工,则主轴将在加工任何连接之前自动重新启动。
- 如果未选中此选项,进给停止将不会停止主轴,用户必须在需要时手动停止主轴。在继续加工之前,用户必须在按下循环开始之前重置主轴。
有关将主轴驱动器连接到 VFD 的更多信息,请参阅我们的主轴 VFD 示例页面。
有关解决 VFD/主轴问题的信息,请参阅此故障排除指南