

 English
English  Spanish
Spanish  French
French  Simplified Chinese
Simplified Chinese Rückkehr zum Ziel
Anleitung ist ein wichtiger Teil der Verwendung Ihres MASSO und es stehen verschiedene Arten von Anleitung zur Verfügung.
Es ist wichtig zu verstehen, dass der Referenzsensor am Ende des Referenzvorgangs zum Hard-Limit-Sensor wird, der es demselben Sensor ermöglicht, die Maschine in der Referenzposition zu lokalisieren und zu überwachen, wenn die Maschine ihre Position verlässt.
Weitere Informationen zum Starten des Startvorgangs finden Sie unter: So finden Sie Ihren Computer ursprünglich
Referenzsensorbaugruppe
Herkömmlicherweise werden Referenzsensoren und Endschalter an den Enden des Wellenwegs angebracht und wieder an die Steuerung angeschlossen.
Dies ist eine Verschwendung von Systemressourcen, Hardware und Verkabelung.
Referenzsensoren funktionieren sehr gut, wenn nur Soft- und Referenzgrenzwerte verwendet werden.
Wenn Sie Ihren Referenzsensor als Referenzsensor und Hard-Limit-Sensor verwenden, empfiehlt es sich, den Referenzsensor am Schlitten der beweglichen Achse zu montieren und an jedem Ende des Verfahrwegs der Referenzsensorachse einen Auslöser für den Sensor zu platzieren. Dadurch kann ein Sensor an beiden Enden seines Pfades mit minimalem Hardware- und Verkabelungsaufwand aktiviert werden. siehe Beispiel unten.
Hinweis: Die Sensorauslösung sollte so erfolgen, dass der Sensor während des gesamten Ortungsvorgangs hoch bleibt.

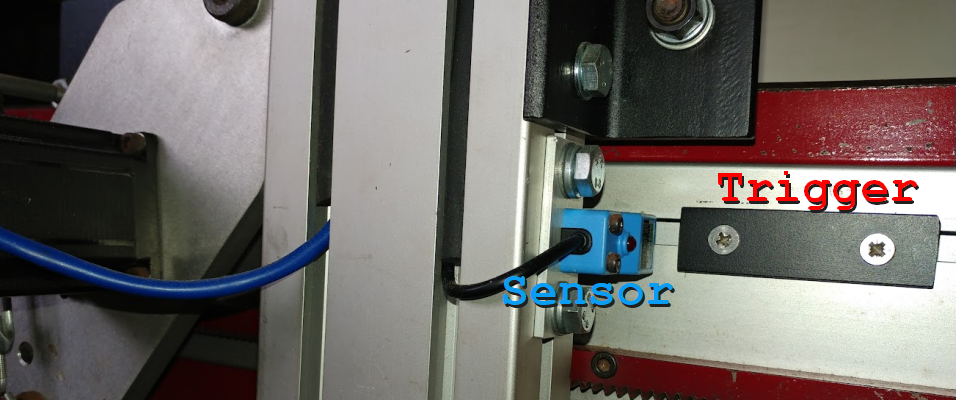
Beispiel einer Achse mit am beweglichen Schlitten montiertem Sensor und montiertem Auslöser auf der festen Schiene
Wenn Sie eine vorhandene Maschine mit Grenz- und Referenzsensoren an jedem Ende der Achse umrüsten, müssen diese gemultiplext und mit dem Achsenreferenzeingang in MASSO verbunden werden.
Wie das geht, hängt vom verwendeten Sensor bzw. Schalter ab. In diesem Fall müssen beide Sensoren oder Schalter an den erforderlichen Referenzeingang der Achse angeschlossen werden, sodass durch Auslösen eines Sensors oder Schalters an einem Ende der Achse der Referenzeingang von Low auf High geändert wird.
Automatische Rückkehr
Dies ist die empfohlene Methode zum Auffinden Ihres Geräts.
Damit die automatische Referenzierung funktioniert, ist für jede zu referenzierende Achse ein Sensor erforderlich.
Bei einer 3-Achsen-Fräsmaschine wären dies die X-, Y- und Z-Achse und würde 3 Referenzsensoren erfordern.
Wenn Sie eine Hardware-Slave-Achse haben, z. B. zwei Motoren, die an Ihre Y-Achse angeschlossen sind, ist nur ein Referenzsensor für die Y-Achse erforderlich, da beide Motoren mit demselben Y-Achsensignal betrieben werden.
Automatische Referenzierung mit Achsquadratur
Wenn Sie Software als Slave nutzen, beinhaltet dies die automatische Quadraturfunktion.
Es nutzt die Position der Referenzschalter auf der Doppelmotorwelle, um die Maschine automatisch auszurichten, während sie sich in ihre Ausgangsposition bewegt.
Zu diesem Zweck verfügt es über einzelne Motoren auf der Doppelachse, die mit verschiedenen Achsen, beispielsweise der Y- und B-Achse, verbunden sind.
Jede Achse verfügt über einen eigenen Sensor und beherbergt einen eigenen Sensor.
Wenn der erste Motor seinen Sensor aktiviert, stoppt er und wartet darauf, dass der zweite Motor seinen Sensor findet und anhält.
Beide Motoren kehren ihre Sensoren um. und am Ende des Referenzvorgangs werden sie zu einer einzigen Achse verriegelt.
Die Position jedes Sensors bestimmt die Quadratur der Achse.
Der beste Weg, eine Achsenquadratur zu erreichen, besteht darin, den Sensor auf einer Seite der Achse relativ zum Sensor auf der anderen Seite der Achse zu bewegen.
Es wird nicht empfohlen, den Ausziehweg zum Einstellen des Rückengurts zu verwenden, da dadurch der Stift bei jeder Einstellung der Maschine aus dem Rückengurt herausgedrückt und dann wieder in die richtige Position zurückgedrückt wird. Dadurch kann die Welle mit der Zeit beschädigt werden, da sie ständig gedreht wird.
Wenn Sie an einer Software-Slave-Achse keinen Sensor pro Motor haben, erhalten Sie einen Startalarm.
Weitere Informationen zu Achsträgertypen finden Sie auf der folgenden Seite
Der Rückgabeprozess
Unabhängig davon, welches Autostartverfahren Sie verwenden, ist die Startreihenfolge dieselbe.
Der Startvorgang wird durch Doppelklicken oder Doppeltippen auf die Startaufforderung auf dem Bildschirm mithilfe von STRG+ALT+H auf einer externen Tastatur oder durch Drücken einer externen Taste auf dem Startcomputer eingeleitet.
Es besteht aus 4 verschiedenen Phasen.
- Finden des Referenzsensors
- Rückgabe, die den Standort des Haupthauses ermittelt
- Erreichen
- Ausgangsposition einstellen
Beispielhafte Startsequenz
- Die Achse bewegt sich in Richtung ihres Achsenreferenzsensors, bis MASSO sieht, dass der Achsenreferenzsensor auf High geht
- Wenn der Referenzsensor bereits hoch ist, geht MASSO davon aus, dass der Sensor bereits gefunden wurde, und fährt mit dem nächsten Schritt im Referenzprozess fort.
- Wenn der Sensor auf High geht, wird die Achse abgebremst und stoppt.
- Die Distanz, die die Achse nach Beginn der Verzögerung zurücklegt, wird durch die Einstellung der Achsbeschleunigung bestimmt.
- Beim Abbremsen und Stoppen sollte der Sensor immer hoch bleiben.
- Der Schaft bewegt sich langsam vom Sensor zurück, bis der Sensor auf „Niedrig“ geht.
- Die Achse stoppt und der Rückzugsvorgang wird mit ermittelter primärer Ausgangsposition abgeschlossen.
- Wenn eine Startdistanz angegeben ist, fährt die Achse mit hoher Geschwindigkeit die angegebene Distanz vom Hauptstartpunkt zurück und stoppt.
- Der aktuellen Position werden nun die an der ursprünglichen Position angezeigten Koordinaten zugewiesen.
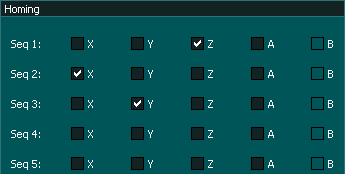
Startvorgang
Dies definiert die Reihenfolge, in der die Achse positioniert wird.
- Sie können sie einzeln oder alle zusammen ausführen.
- Software-Slave-Achsen werden automatisch ausgegraut und können nicht ausgewählt werden.

- Wenn eine Slave-Achse ein Häkchen aufweist, liegt das daran, dass sie vor der Slave-Achse markiert wurde und auf die gleiche Weise wie eine nicht markierte Achse funktioniert.

- Eine Slave-Achse funktioniert korrekt, unabhängig davon, ob die Slave-Achse aktiviert angezeigt wird oder nicht, da sie von der Master-Achse gesteuert wird.
- Alle nicht ausgewählten Achsen werden am Ende des Referenzierungsvorgangs automatisch auf den Referenzpositionswert gesetzt.
Richtungsumkehr
Dieser Parameter ändert die Richtung, die die Achse bei der Suche nach dem Referenzsensor verwendet.
INFORMATION: Bevor Sie diese Richtung festlegen, stellen Sie sicher, dass Sie die Achse so eingestellt haben, dass sie sich für die Bearbeitung in die richtige Richtung bewegt.

Referenz-Feed
Dieser Parameter bestimmt, wie schnell sich die Achse bei der Suche nach dem Referenzsensor bewegt.

Die maximale Referenzvorwärtsgeschwindigkeit wird letztendlich durch die Beschleunigung des Motors bestimmt.
Je geringer Ihre Beschleunigung ist, desto länger dauert das Abbremsen der Achse, sobald der Referenzsensor aktiviert ist.
Ihre Achse muss innerhalb von 10 mm oder 0,3937 Zoll von diesem Auslösepunkt anhalten, andernfalls kann MASSO nicht umkehren, bevor ein Alarm ertönt.
Eine langsame Wellenbeschleunigung bedeutet eine langsame Verzögerung und einen längeren Hub vor dem Stoppen, sodass Motoren mit höheren Beschleunigungen höhere Referenzvorschubgeschwindigkeiten haben können.
zurückziehen
Der Zweck der Rücktaste besteht darin, den Punkt genau zu lokalisieren, an dem der Referenzsensor auf „Niedrig“ zurückkehrt.
Dadurch wird der sogenannte Hauptstandort der Maschine genau festgelegt.
Dies kann die endgültige Ausgangsposition sein oder auch nicht.
Regeln
- Der Auslöser des Referenzsensors sollte hoch bleiben, bis sich die Welle vom Sensor entfernt. das heißt, es sollte nicht auslösen und auf Low zurückkehren, bevor die Achse stoppt.
- Stellen Sie sicher, dass Ihr Sensor nach der Aktivierung mindestens 10 mm angehoben bleibt.
- Wenn der Referenzsensor nicht innerhalb von 10 mm oder 0,3937 Zoll auf „Low“ zurückkehrt, wird ein Referenzalarm aktiviert.
- Wenn der Referenzsensor während der Verzögerungsphase auf Low geschaltet wird, bewegt sich der Sensor nicht zurück.
Extraktionsentfernung

Einstellung der Grundposition

Manuelle Referenzierung / Verlustreferenzierung
Dazu müssen Sie sich zu einem bestimmten, wiederholbaren Ort auf der Maschine bewegen, den Sie Ihre Heimatposition nennen möchten.
- Dies kann durch manuelles Bewegen der X-, Y- und Z-Achsen an die vorgesehene Position und Doppelklicken auf die Home-Schaltfläche erfolgen.
- Dazu gehört der Start bei Strömungsabriss, bei dem die Achse bis zum Anschlag an physische Hindernisse bewegt wird, um als wiederholbare Position zu fungieren, und dann auf die Schaltfläche „Start“ doppelgeklickt wird, um sie als Strömungsabrissposition festzulegen.
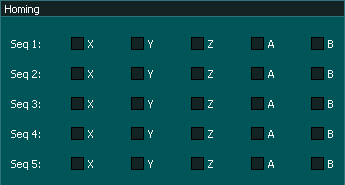
- Für diese Methode sind keine Standortsensoren erforderlich.
- Um diese Methode verwenden zu können, müssen alle Achsen in der Homing-Sequenz deaktiviert bleiben.
- Jeder Achse wird die Koordinate der Startposition zugewiesen
Richten Sie SEO Schritt für Schritt ein
Probleme lösen
Wenn Sie während des Startvorgangs Startalarme erhalten, kann es mehrere Ursachen geben, die Sie untersuchen müssen.
- Stellen Sie sicher, dass alle Referenzsensoren auf dem F1-Bildschirm „Niedrig“ anzeigen, wenn der Sensor nicht aktiviert ist.
- Stellen Sie sicher, dass die Referenzsensoren auf High gehen, wenn sie von der Achse aktiviert werden.
- Wenn sich die Achse bei Ihrer Ankunft langsam um 10 mm zurückbewegt und einen Alarm auslöst, anstatt sich auf den Referenzsensor zuzubewegen, ist Ihr Referenzsensor auf Seite F1 auf „Hoch“ eingestellt oder der Sensor ist defekt.
- Wenn Sie einen Referenzalarm erhalten, wenn sich die Achse um einen Sensor zurückbewegt, liegt die wahrscheinlichste Ursache darin, dass die Achse durch eine Verzögerung um mehr als 10 mm abgebremst wurde. Eine Reduzierung des Referenzvorschubs löst dieses Problem.
- Wenn Sie beim Starten einer Achse einen Hard-Limit-Alarm erhalten, ist es höchstwahrscheinlich, dass Sie den Startsensor aktiviert haben, ihn dann auf die andere Seite weitergegeben haben und der Sensor wieder heruntergekommen ist. In diesem Fall kann die Welle nicht auf den Sensor zurückgeführt werden, da der Füllstand bereits niedrig ist. Wenn Sie versuchen, den Sensor zu entfernen, wird ein Alarm für den harten Grenzwert ausgelöst. Der Sensor sollte hoch bleiben, bis sich die Achse vom Referenzsensor entfernt. Stellen Sie sicher, dass Ihr Sensor nach der Aktivierung mindestens 10 mm angehoben bleibt. Wenn dies nicht möglich ist, kann auch eine Reduzierung der Referenzgeschwindigkeit oder eine Erhöhung der Achsbeschleunigung helfen.
- Wenn die Maschine nach dem Start eingeschaltet bleibt und blinkt, aber nichts tut, liegt die wahrscheinlichste Ursache darin, dass Auto Tool Zero aktiviert, aber nicht richtig konfiguriert ist. Wenn die Deaktivierung von Auto Tool Zero den Lokalisierungsfehler behebt, Sie aber einen Werkzeugkonfigurator installiert haben, überprüfen Sie die Einstellungen des Werkzeugkonfigurators, da dort das Problem liegt.
- Wenn die Maschine nach dem Start anhält und „Homing“ blinkt, aber nichts tut, ist möglicherweise ein Werkzeugwechsler auf Ihrer Maschine aktiviert, Sie haben ihn jedoch nicht richtig konfiguriert. Einige Arten von Werkzeugwechslern kehren während der Referenzsequenz in die Ausgangsstellung zurück. Schalten Sie den Werkzeugwechsler in den manuellen Modus, bis Sie die Installation Ihres Werkzeugwechslers abgeschlossen haben.
- Wenn die Maschine nach dem Booten weiterhin Homing anzeigt und blinkt, kann eine andere Ursache ein Software-Limit-Problem sein. Dies kann daran liegen, dass sich der Werkzeugeinsteller außerhalb der Soft-Limits befindet oder dass Sie Soft-Limits für die Z-Achse festgelegt haben, die verhindern, dass sich die Z-Achse in Richtung der Z0-Maschinenkoordinate bewegt. Die Z-Achse steigt auf Z0, bevor das Werkzeug bewegt wird. Wenn die Soft-Limits dies verhindern, stoppt die Maschine und läuft schließlich ab. Stellen Sie sicher, dass alle Achsen-Softlimits eine Bewegung in Richtung der Werkzeugposition ermöglichen und dass sich die Z-Achse in Richtung Z0 und weit genug bewegen kann, um das Werkzeug in der Werkzeugposition zu berühren.
- Wenn Sie nicht sicher sind, wie Sie Ihren Referenzsensor anschließen, lesen Sie unsere Kurzanleitung zur Identifizierung des Referenzsensors .
- Bei einer Software-Slave-Achse ist es sehr wichtig, dass der richtige Sensor dem richtigen Motor zugeordnet ist, sonst erhält man sehr seltsame Ergebnisse beim Auffinden der Slave-Achse. Verwenden Sie die im Homing-Video oben gezeigte Technik, um zu identifizieren, welcher Slave-Achsenmotor welcher und welcher Sensor welcher ist. Gehen Sie nicht davon aus...