

 English
English  French
French  German
German  Simplified Chinese
Simplified Chinese Buscador de blancos
El guiado es una parte importante del uso de su MASSO y hay varios tipos de guiado disponibles.
Es importante comprender que el sensor de referencia al final del proceso de referencia cambia para convertirse en el sensor de límite estricto, que permite que el mismo sensor ubique la máquina en posición de referencia y monitoree cuando la máquina se mueve fuera de sus límites.
Para obtener información adicional sobre cómo iniciar el proceso de inicio, consulte: Cómo ubicar su máquina en el origen
Montaje del sensor de referencia
Tradicionalmente, los sensores de homing y los interruptores de límite se colocan en los extremos del recorrido del eje y se conectan nuevamente al controlador.
Esto supone un desperdicio de recursos del sistema, hardware y cableado.
Los sensores de referencia funcionan muy bien cuando solo se utilizan límites suaves y de referencia.
Cuando utilice su sensor de referencia como sensor de referencia y sensor de límite estricto, se recomienda montar el sensor de referencia en el carro del eje móvil y colocar un disparador para el sensor en cada extremo del recorrido del eje. Esto permite que un sensor se active en cada extremo de su recorrido con un mínimo de hardware y cableado necesarios. vea el ejemplo a continuación.
Nota: el disparador del sensor debe ser tal que el sensor permanezca alto durante todo el proceso de localización.

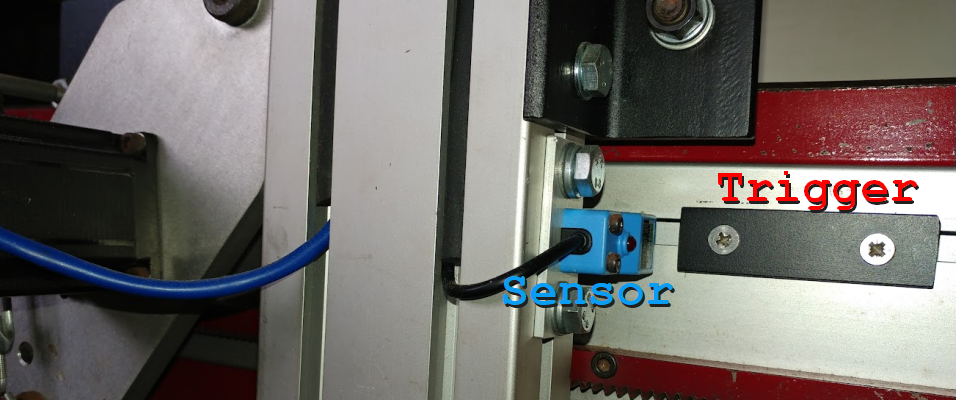
Eje de ejemplo con el sensor montado en el carro móvil y el gatillo montado en el carril estacionario
Si se convierte una máquina existente con sensores de límite y de referencia en cada extremo del eje, estos deberán multiplexarse ??y conectarse a la entrada de referencia del eje en MASSO.
La forma de hacerlo dependerá del sensor o interruptor que se utilice. En este caso, ambos sensores o interruptores deberán conectarse a la entrada de referencia del eje requerida de tal manera que el disparador de cualquiera de los sensores o interruptores en cualquier extremo del eje cambie la entrada de referencia de Baja a Alta.
Auto retorno
Este es el método recomendado para localizar su máquina.
Para que funcione la referencia automática, se requiere un sensor para cada eje que se referenciará.
En una fresadora de 3 ejes, ese sería el eje X, Y y Z y requerirá 3 sensores de referencia.
Si tiene un eje esclavo de hardware, como 2 motores conectados a su eje Y, entonces solo se requiere un sensor de referencia para el eje Y, ya que ambos motores funcionan desde la misma señal del eje Y.
Homing automático con cuadratura del eje
Si utiliza software como esclavo, esto incluye la función de cuadratura automática.
Utiliza la posición de los interruptores de referencia en el eje del motor dual para cuadrar automáticamente la máquina a medida que se dirige a su posición inicial.
Para ello, tiene motores individuales en el eje dual conectados a diferentes ejes, como los ejes Y y B.
Cada eje tendrá su propio sensor y albergará su propio sensor.
Cuando el primer motor activa su sensor, se detendrá y esperará a que el segundo motor localice su sensor y se detenga.
Ambos motores retrocederán sus sensores. y al final del proceso de referencia se bloquearán para formar un solo eje.
La posición de cada sensor determinará la cuadratura del eje.
La mejor forma de lograr la cuadratura del eje es moviendo el sensor de un lado del eje con respecto al sensor del otro lado del eje.
No se recomienda utilizar la distancia de extracción para ajustar el escuadrado, ya que esto forzará que el eje salga del escuadrado y luego vuelva a escuadrarse cada vez que se ajuste la máquina. Esto puede provocar daños en el eje con el tiempo, ya que lo girará constantemente.
Si no tiene un sensor por motor en un eje esclavo por software, obtendrá una alarma de inicio.
Para obtener más información sobre los tipos de esclavitud de ejes, consulte la siguiente página
El proceso de retorno
Independientemente del proceso de inicio automático que utilice, la secuencia de inicio es la misma.
El inicio se inicia haciendo doble clic o tocando dos veces la indicación de inicio en la pantalla usando CTRL+ALT + H en un teclado externo o presionando un botón externo de la máquina de inicio.
Consta de 4 fases distintas.
- Buscando el sensor de referencia
- Retroceder que localiza la ubicación de la casa principal
- Lograr
- Establecer posición inicial
Ejemplo de secuencia de inicio
- El eje se mueve hacia su sensor de referencia de eje hasta que MASSO ve que el sensor de referencia de eje cambia a Alto
- Si el sensor de referencia ya está en nivel alto, MASSO asumirá que el sensor ya está encontrado y pasará al siguiente paso en el proceso de referencia.
- Cuando el sensor cambia a Alto, el eje desacelera y se detiene.
- La distancia que recorre el eje después de comenzar a desacelerar está determinada por la configuración de aceleración del eje.
- Durante la desaceleración y parada el sensor debe permanecer Alto en todo momento.
- El eje retrocede lentamente fuera del sensor hasta que el sensor cambia a Bajo.
- El eje se detiene y el proceso de retroceso se completa con la posición inicial primaria ubicada.
- Si se especifica una distancia de despegue, el eje se moverá a gran velocidad la distancia especificada desde la ubicación inicial principal y se detendrá.
- A la posición actual ahora se le asignan las coordenadas que se muestran en la posición de inicio.
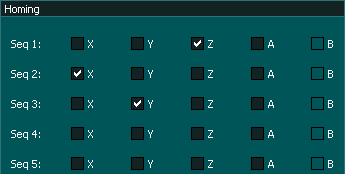
Secuencia de inicio
Esto define el orden en el que el eje se posicionará.
- Puedes hacerlos uno a la vez o hacerlos todos juntos.
- Los ejes esclavos de software aparecen automáticamente atenuados y no se pueden seleccionar.

- Si un eje esclavo muestra un tick es porque estaba marcado antes de ser esclavo y funcionará igual que uno no marcado.

- Un eje esclavo funciona correctamente ya sea que el eje esclavo se muestre marcado o no, ya que está controlado por el eje maestro.
- Cualquier eje que no esté seleccionado se establecerá automáticamente en el valor de posición inicial al final del proceso de referencia.
Inversión de dirección
Esta configuración cambia la dirección que utiliza el eje cuando busca el sensor de Homing.
INFORMACIÓN: Antes de configurar esta dirección, asegúrese de haber configurado el eje para que se mueva en la dirección correcta para el mecanizado.

Avance de referencia
Esta configuración determina qué tan rápido se moverá el eje cuando busque el sensor de referencia.

La velocidad máxima de avance de referencia está determinada en última instancia por la aceleración del motor.
Cuanto menor sea su aceleración, más tiempo llevará desacelerar el eje una vez que se active el sensor de referencia.
Su eje debe detenerse dentro de los 10 mm o 0,3937" de este punto de activación o MASSO no podrá retroceder antes de emitir una alarma.
Una aceleración lenta del eje significa una desaceleración lenta y un recorrido más largo antes de detenerse, con el resultado de que los motores con aceleraciones más altas pueden tener tasas de alimentación de referencia más altas.
Apártate
El propósito de Retroceder es localizar con precisión el punto en el que el sensor de referencia regresa a Bajo.
Esto fija con precisión lo que se llama la ubicación principal de la máquina.
Esta puede ser o no la posición inicial final.
Normas
- El disparador del sensor de referencia debe permanecer alto hasta que el eje retroceda del sensor. es decir, no debe dispararse y regresar a Bajo antes de que el eje se detenga.
- Asegúrese de que su sensor permanezca alto durante un mínimo de 10 mm una vez activado.
- Si el sensor de referencia no regresa a Bajo dentro de 10 mm o 0,3937" se activará una alarma de referencia.
- Si el sensor de referencia cambió a Bajo durante la fase de desaceleración, no retrocederá el sensor.
Distancia de extracción

Configuración de la posición inicial

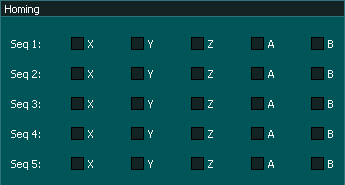
Referenciado manual / Referenciado en pérdida
Esto implica moverse a una ubicación específica y repetible en la máquina a la que desea llamar su posición inicial.
- Esto se puede hacer moviendo manualmente los ejes X, Y y Z a la posición designada y haciendo doble clic en el botón Inicio.
- Esto incluye el inicio de pérdida, que implica mover el eje hasta que se detenga contra barreras físicas para actuar como una posición repetible y luego hacer doble clic en el botón Inicio para establecerlo como la posición de inicio.
- Este método no requiere sensores de localización.
- Para utilizar este método, todos los ejes deben dejarse sin marcar en la secuencia de Homing.
- A cada eje se le asignará la coordenada de la Posición de Inicio
Configurar el homing paso a paso
Solución de problemas
Si recibe alarmas de inicio al realizar el inicio, puede haber varias causas que debe investigar.
- Asegúrese de que todos los sensores de referencia muestren Bajo en la pantalla F1 cuando el sensor no esté activado
- Asegúrese de que los sensores de referencia cambien a Alto cuando los active el eje.
- Si cuando llega a casa, el eje se mueve lentamente hacia atrás 10 mm y emite una alarma en lugar de moverse hacia el sensor de referencia, entonces su sensor de referencia está configurado en Alto en la página F1 o el sensor está defectuoso.
- Si recibe una alarma de referencia cuando el eje está retrocediendo un sensor, la causa más probable es que la desaceleración del eje lo llevó más allá de 10 mm. Reducir la velocidad de avance de referencia solucionará este problema.
- Si recibe una alarma de límite estricto durante el inicio de un eje, lo más probable es que activó el sensor de inicio y luego lo pasó al otro lado y el sensor volvió a bajar. En este caso, el eje no retrocederá del sensor porque ya está bajo y cuando intente retirar el sensor, activará una alarma de límite estricto. El sensor debe permanecer alto hasta que el eje retroceda del sensor de referencia. Asegúrese de que su sensor permanezca alto durante un mínimo de 10 mm una vez activado. Reducir la velocidad de referencia o aumentar la aceleración del eje también puede ayudar si esto no es posible.
- Si después de realizar el inicio la máquina se queda y parpadea pero no hace nada, la causa más probable es que Auto Tool Zero esté encendido pero no lo haya configurado correctamente. Si al desactivar Auto Tool Zero se soluciona el error de localización pero tiene instalado un configurador de herramientas, verifique la configuración del configurador de herramientas, ya que aquí es donde radica el problema.
- Si después del inicio la máquina se queda y parpadea Homing pero no hace nada, es posible que tenga un cambiador de herramientas habilitado en su máquina pero no lo haya configurado correctamente. Algunos tipos de cambiadores de herramientas regresan a casa durante la secuencia de referencia. Cambie el cambiador de herramientas a manual hasta que haya completado la instalación de su cambiador de herramientas.
- Si después de realizar el inicio la máquina se queda y parpadea Homing, otra causa puede ser que tenga un problema de límite suave. Esto puede deberse a que el configurador de herramientas está fuera de los límites suaves o que usted haya establecido los límites suaves para el eje Z impidiendo que se mueva el eje Z a la coordenada de la máquina Z0. El eje Z se elevará a Z0 antes de mover el ajustador de herramientas y, si sus límites suaves lo impiden, la máquina se detendrá y, finalmente, se agotará el tiempo de espera. Asegúrese de que todos los límites suaves de los ejes permitan el movimiento a la ubicación del posicionador de herramientas y que el eje Z pueda moverse hasta Z0 y hacia abajo lo suficiente como para tocar la herramienta en el posicionador de herramientas.
- Si no está seguro de cómo debe conectarse su sensor de referencia, consulte nuestra guía de inicio rápido sobre identificación del sensor de referencia .
- En un eje esclavo por software es muy importante que el sensor correcto esté asignado al motor correcto o obtendrá resultados muy extraños al localizar el eje esclavo. Utilice la técnica que se muestra en el video Homing de arriba para identificar qué motor de un eje esclavo es cuál y qué sensor es cuál. No asuma..