

 English
English  Spanish
Spanish  German
German  Simplified Chinese
Simplified Chinese Retour à destination
Le guidage est une partie importante de l'utilisation de votre MASSO et il existe plusieurs types de guidage disponibles.
Il est important de comprendre que le capteur de référence à la fin du processus de référence change pour devenir le capteur de limite stricte, ce qui permet au même capteur de localiser la machine dans la position de référence et de surveiller lorsque la machine sort de ses limites.
Pour plus d'informations sur la façon de démarrer le processus de démarrage, voir : Comment localiser votre machine à l'origine
Ensemble capteur de référence
Traditionnellement, les capteurs de référencement et les interrupteurs de fin de course sont placés aux extrémités de la course de l'arbre et reconnectés au contrôleur.
Il s'agit d'un gaspillage de ressources système, de matériel et de câblage.
Les capteurs de référence fonctionnent très bien lorsque seules des limites souples et de référence sont utilisées.
Lorsque vous utilisez votre capteur de référence comme capteur de référence et capteur de limite stricte, il est recommandé de monter le capteur de référence sur le chariot de l'axe mobile et de placer un déclencheur pour le capteur à chaque extrémité de la course de l'axe. Cela permet à un capteur d'être activé à chaque extrémité de son trajet avec un minimum de matériel et de câblage requis. voir exemple ci-dessous.
Remarque : Le déclenchement du capteur doit être tel que le capteur reste élevé tout au long du processus de localisation.

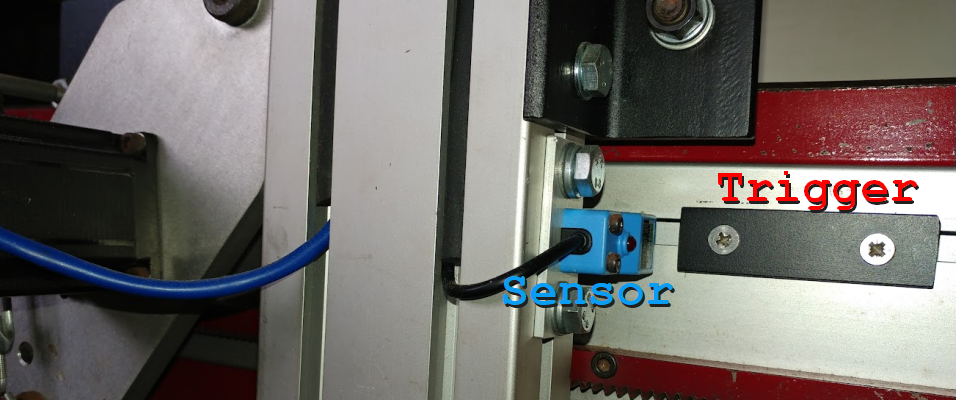
Exemple d'axe avec le capteur monté sur le chariot mobile et la gâchette montée sur le rail fixe
Si vous convertissez une machine existante avec des capteurs de limite et de référence à chaque extrémité de l'axe, ceux-ci devront être multiplexés et connectés à l'entrée de référence d'axe dans MASSO.
La manière de procéder dépend du capteur ou du commutateur utilisé. Dans ce cas, les deux capteurs ou commutateurs doivent être connectés à l'entrée de référence d'axe requise de telle sorte que le déclenchement de l'un ou l'autre des capteurs ou commutateurs à l'une des extrémités de l'axe fasse passer l'entrée de référence de Low à High.
Retour automatique
Il s'agit de la méthode recommandée pour localiser votre machine.
Pour que le référencement automatique fonctionne, un capteur est nécessaire pour chaque axe à référencer.
Sur une fraiseuse à 3 axes, il s'agirait des axes X, Y et Z et nécessiterait 3 capteurs de référence.
Si vous disposez d'un axe esclave matériel, tel que 2 moteurs connectés à votre axe Y, alors un seul capteur de référence est requis pour l'axe Y, car les deux moteurs fonctionnent à partir du même signal de l'axe Y.
Prise d'origine automatique avec quadrature d'axe
Si vous utilisez un logiciel comme esclave, cela inclut la fonction de quadrature automatique.
Il utilise la position des interrupteurs de référence sur l'arbre du moteur double pour aligner automatiquement la machine lorsqu'elle se déplace vers sa position d'origine.
Pour ce faire, il dispose de moteurs individuels sur le double axe connectés à différents axes, tels que les axes Y et B.
Chaque axe aura son propre capteur et abritera son propre capteur.
Lorsque le premier moteur active son capteur, il s'arrête et attend que le deuxième moteur localise son capteur et s'arrête.
Les deux moteurs inverseront leurs capteurs. et à la fin du processus de référence ils seront verrouillés pour former un seul axe.
La position de chaque capteur déterminera la quadrature de l'axe.
La meilleure façon d'obtenir la quadrature de l'axe consiste à déplacer le capteur d'un côté de l'axe par rapport au capteur de l'autre côté de l'axe.
Il n'est pas recommandé d'utiliser la distance d'extraction pour ajuster la sangle arrière, car cela forcerait la broche à sortir de la sangle arrière puis à revenir en équerrage à chaque fois que la machine est ajustée. Cela peut endommager l'arbre au fil du temps, car vous le tournerez constamment.
Si vous n'avez pas de capteur par moteur sur un axe esclave logiciel, vous recevrez une alarme de démarrage.
Pour plus d'informations sur les types de servitude d'essieu, consultez la page suivante
Le processus de retour
Quel que soit le processus de démarrage automatique que vous utilisez, la séquence de démarrage est la même.
Le démarrage est lancé en double-cliquant ou en appuyant deux fois sur l'invite de démarrage à l'écran en utilisant CTRL+ALT + H sur un clavier externe ou en appuyant sur un bouton externe de la machine de démarrage.
Il se compose de 4 phases différentes.
- Recherche du capteur de référence
- Retour qui situe l'emplacement de la maison principale
- Atteindre
- Définir la position initiale
Exemple de séquence de démarrage
- L'axe se déplace vers son capteur de référence d'axe jusqu'à ce que MASSO voit le capteur de référence d'axe passer à High
- Si le capteur de référence est déjà élevé, MASSO supposera que le capteur est déjà trouvé et passera à l'étape suivante du processus de référence.
- Lorsque le capteur passe à High, l'axe décélère et s'arrête.
- La distance parcourue par l'essieu après avoir commencé à décélérer est déterminée par le réglage de l'accélération de l'essieu.
- Pendant la décélération et l'arrêt, le capteur doit rester haut à tout moment.
- L'arbre recule lentement hors du capteur jusqu'à ce que le capteur passe à Low.
- L'axe s'arrête et le processus de recul est terminé avec la position d'origine principale localisée.
- Si une distance de décollage est spécifiée, l'axe se déplacera à grande vitesse sur la distance spécifiée depuis le point de départ principal et s'arrêtera.
- La position actuelle se voit désormais attribuer les coordonnées affichées dans la position d'origine.
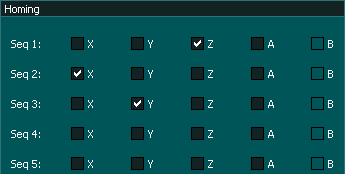
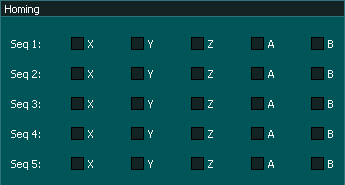
Séquence de démarrage
Ceci définit l'ordre dans lequel l'axe sera positionné.
- Vous pouvez les faire un par un ou tous ensemble.
- Les axes esclaves logiciels sont automatiquement grisés et ne peuvent pas être sélectionnés.

- Si un axe esclave affiche une coche, c'est parce qu'il a été marqué avant d'être asservi et qu'il fonctionnera de la même manière qu'un axe non marqué.

- Un axe esclave fonctionne correctement, que l'axe esclave soit affiché coché ou non, puisqu'il est contrôlé par l'axe maître.
- Tout axe non sélectionné sera automatiquement réglé sur la valeur de position d'origine à la fin du processus de prise d'origine.
Inversion de direction
Ce paramètre modifie la direction utilisée par l'axe lors de la recherche du capteur de référence.
INFORMATION : Avant de définir cette direction, assurez-vous d'avoir réglé l'axe pour qu'il se déplace dans la bonne direction pour l'usinage.

Avance de référence
Ce paramètre détermine la vitesse à laquelle l'axe se déplacera lors de la recherche du capteur de référence.

La vitesse d'avancement de référence maximale est finalement déterminée par l'accélération du moteur.
Plus votre accélération est faible, plus il faudra de temps pour décélérer l'axe une fois le capteur de référence activé.
Votre axe doit s'arrêter à moins de 10 mm ou 0,3937" de ce point de déclenchement, sinon MASSO ne pourra pas reculer avant d'émettre une alarme.
Une accélération lente de l'arbre signifie une décélération lente et une course plus longue avant l'arrêt, de sorte que les moteurs avec des accélérations plus élevées peuvent avoir des vitesses d'avance de référence plus élevées.
reculer
Le but de Backspace est de localiser précisément le point auquel le capteur de référence revient à Low.
Cela fixe précisément ce qu’on appelle l’emplacement principal de la machine.
Cela peut être ou non la position de départ finale.
Règles
- Le déclencheur du capteur de référence doit rester haut jusqu'à ce que l'arbre s'éloigne du capteur. c'est-à-dire qu'il ne doit pas se déclencher et revenir à Low avant que l'axe ne s'arrête.
- Assurez-vous que votre capteur reste élevé pendant au moins 10 mm une fois activé.
- Si le capteur de référence ne revient pas à Low dans un délai de 10 mm ou 0,3937", une alarme de référence sera activée.
- Si le capteur de référence est passé à Low pendant la phase de décélération, le capteur ne reculera pas.
Distance d'extraction

Réglage de la position d'origine

Référencement manuel / Référencement perte
Cela implique de se déplacer vers un emplacement spécifique et reproductible sur la machine que vous souhaitez appeler votre position d'origine.
- Cela peut être fait en déplaçant manuellement les axes X, Y et Z vers la position désignée et en double-cliquant sur le bouton Accueil.
- Cela inclut le démarrage au décrochage, qui implique de déplacer l'axe jusqu'à ce qu'il s'arrête contre des barrières physiques pour agir comme une position répétable, puis de double-cliquer sur le bouton Démarrer pour le définir comme position de départ.
- Cette méthode ne nécessite pas de capteurs de localisation.
- Pour utiliser cette méthode, tous les axes doivent être laissés décochés dans la séquence Homing.
- Chaque axe se verra attribuer la coordonnée de la position de départ
Configurer le référencement étape par étape
Solution de problèmes
Si vous recevez des alarmes de démarrage au démarrage, il peut y avoir plusieurs causes sur lesquelles vous devez enquêter.
- Assurez-vous que tous les capteurs de référence affichent Low sur l'écran F1 lorsque le capteur n'est pas activé.
- Assurez-vous que les capteurs de référence passent à High lorsqu'ils sont activés par l'axe.
- Si lorsque vous rentrez chez vous, l'axe recule lentement de 10 mm et déclenche une alarme au lieu de se déplacer vers le capteur de référence, alors votre capteur de référence est réglé sur High à la page F1 ou le capteur est défectueux.
- Si vous recevez une alarme de référence lorsque l'axe recule d'un capteur, la cause la plus probable est que la décélération de l'axe l'a fait dépasser 10 mm. La réduction de l'avance de référence résoudra ce problème.
- Si vous recevez une alarme de limite stricte lors du démarrage d'un axe, il est fort probable que vous ayez activé le capteur de démarrage, puis que vous l'ayez transmis de l'autre côté et que le capteur soit redescendu. Dans ce cas, l'arbre ne reculera pas sur le capteur car il est déjà bas et lorsque vous essayez de retirer le capteur, il déclenchera une alarme de limite stricte. Le capteur doit rester haut jusqu'à ce que l'axe s'éloigne du capteur de référence. Assurez-vous que votre capteur reste élevé pendant au moins 10 mm une fois activé. Réduire la vitesse de référence ou augmenter l'accélération de l'axe peut également aider si cela n'est pas possible.
- Si après le démarrage, la machine reste allumée et clignote mais ne fait rien, la cause la plus probable est que Auto Tool Zero est activé mais n'est pas configuré correctement. Si la désactivation d'Auto Tool Zero corrige l'erreur de localisation mais qu'un configurateur d'outils est installé, vérifiez les paramètres du configurateur d'outils car c'est là que réside le problème.
- Si après le démarrage, la machine reste et clignote Homing mais ne fait rien, il se peut qu'un changeur d'outils soit activé sur votre machine mais que vous ne l'ayez pas configuré correctement. Certains types de changeurs d'outils rentrent chez eux pendant la séquence de référence. Basculez le changeur d'outils en mode manuel jusqu'à ce que vous ayez terminé l'installation de votre changeur d'outils.
- Si après le démarrage, la machine reste et clignote Homing, une autre cause peut être qu'elle a un problème de limite logicielle. Cela peut être dû au fait que le dispositif de réglage de l'outil se trouve en dehors des limites souples ou que vous avez défini les limites souples pour l'axe Z empêchant l'axe Z de se déplacer vers la coordonnée machine Z0. L'axe Z montera à Z0 avant de déplacer l'outil et si ses limites souples l'empêchent, la machine s'arrêtera et finira par expirer. Assurez-vous que toutes les limites souples de l'axe permettent le mouvement vers l'emplacement du localisateur d'outil et que l'axe Z peut se déplacer vers Z0 et suffisamment loin pour toucher l'outil dans le localisateur d'outil.
- Si vous ne savez pas comment connecter votre capteur de référence, consultez notre guide de démarrage rapide sur l'identification du capteur de référence .
- Sur un axe esclave logiciel, il est très important que le bon capteur soit affecté au bon moteur, sinon vous obtiendrez des résultats très étranges lors de la localisation de l'axe esclave. Utilisez la technique présentée dans la vidéo Homing ci-dessus pour identifier quel moteur d'axe esclave est lequel et quel capteur est lequel. N'assume pas..