

 English
English  Spanish
Spanish  French
French  German
German 返回目的地
指导是使用 MASSO 的重要组成部分,并且提供不同类型的指导。
重要的是要了解,在归位过程结束时,参考传感器成为硬限位传感器,这允许同一传感器将机器定位在参考位置并监控机器何时离开其位置。
有关启动引导过程的更多信息,请参阅: 如何找到您的计算机最初
参考传感器组件
传统上,参考传感器和限位开关连接到轴路径的末端并连接回控制器。
这是对系统资源、硬件和布线的浪费。
当仅使用软限制和参考限制时,参考传感器工作得非常好。
如果您将参考传感器用作参考传感器和硬限位传感器,建议将参考传感器安装在移动轴滑块上,并在参考传感器轴行程的每一端放置一个传感器触发器。这样就可以用最少的硬件和布线在其路径的两端激活传感器。请参见下面的示例。
注意:传感器触发应确保传感器在整个定位过程中保持高电平。

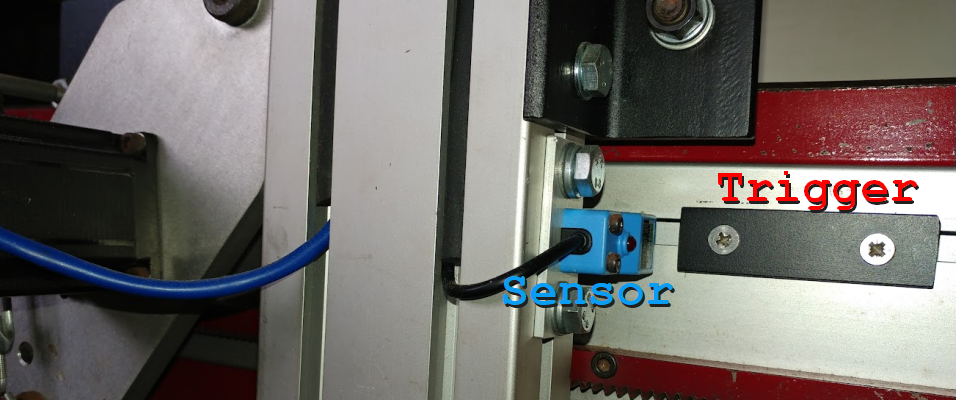
传感器安装在移动托架上、触发器安装在固定导轨上的轴示例
如果您正在改造现有机器,并在轴的每一端配备限制和参考传感器,则这些传感器必须多路复用并连接到 MASSO 中的轴参考输入。
其工作原理取决于所使用的传感器或开关。在这种情况下,传感器或开关都必须连接到轴所需的参考输入,以便触发轴一端的传感器或开关将参考输入从低变为高。
自动返回
这是定位设备的推荐方法。
为了实现自动归位,每个轴都需要一个传感器作为参考。
在 3 轴铣床上,这将是 X、Y 和 Z 轴,并且需要 3 个参考传感器。
如果您有硬件从轴,例如例如,如果您有两个电机连接到 Y 轴,则只需要一个 Y 轴参考传感器,因为两个电机都使用相同的 Y 轴信号运行。
轴正交自动参考
如果您使用软件作为从站,则这包括自动正交功能。
它利用双电机轴上参考开关的位置,在机器移动到其原始位置时自动调平机器。
为此,它在双轴上配备了单独的电机,这些电机连接到不同的轴,例如 Y 轴和 B 轴。
每个轴都有自己的传感器并容纳自己的传感器。
当第一个电机激活其传感器时,它会停止并等待第二个电机找到其传感器并停止。
两台发动机都反转了传感器。在归位过程结束时,它们被锁定在单个轴上。
每个传感器的位置决定轴的正交度。
实现轴平直的最佳方法是相对于轴另一侧的传感器移动轴一侧的传感器。
不建议使用延伸路径来调整背带,因为这会将销钉推出背带,然后在每次调整机器时将其推回正确位置。随着时间的推移,由于轴不断旋转,这可能会导致轴损坏。
如果软件从轴上的每个电机没有传感器,您将收到启动警报。
有关轴架类型的更多信息,请参见下页
退货流程
无论使用哪种启动方式,启动顺序都是相同的。
通过使用外部键盘上的 CTRL+ALT+H 双击或双击屏幕上的启动提示或按启动计算机上的外部键来启动启动过程。
它由 4 个不同的阶段组成。
- 寻找参考传感器
- 返回确定主屋位置
- 达到
- 设置起始位置
启动顺序示例
- 轴朝其轴参考传感器移动,直到 MASSO 看到轴参考传感器变高
- 如果参考传感器已经为高电平,则 MASSO 假定已找到传感器并继续参考过程中的下一步。
- 当传感器变高时,轴减慢并停止。
- 开始减速后轴行进的距离由轴加速度设置决定。
- 制动和停止时传感器应始终保持高电平。
- 轴慢慢地从传感器移回,直到传感器变低。
- 轴停止,缩回过程完成,并确定主起始位置。
- 如果指定了起始距离,则轴从主起始点高速移动指定距离并停止。
- 现在,当前位置被指定为原始位置处显示的坐标。
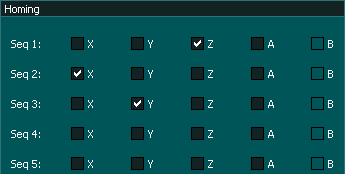
启动过程
这定义了轴的定位顺序。
- 您可以单独进行或一起进行。
- 软件从轴自动变灰且无法选择。

- 如果从轴有复选标记,这是因为它在从轴之前被标记,并且其功能与未标记的轴相同。

- 无论从轴是否显示为启用,从轴都能正常工作,因为它是由主轴控制的。
- 在归位过程结束时,所有未选择的轴都会自动设置为参考位置值。
方向反转
该参数更改搜索参考传感器时轴使用的方向。
信息:设置此方向之前,请确保已将轴设置为沿正确的加工方向移动。

参考饲料
该参数决定搜索参考传感器时轴移动的速度。

最大参考前进速度最终由电机的加速度决定。
加速度越低,参考传感器激活后制动轴所需的时间就越长。
您的车轴必须停在距离该触发点 10 毫米或 0.3937 英寸的范围内,否则 MASSO 将无法在警报响起之前倒车。
轴加速慢意味着减速慢,停止前的行程更长,因此加速度较高的电机可以有较高的参考进给速度。
提取
退格键的目的是精确定位参考传感器返回低值的点。
这恰恰决定了机器的所谓主要位置。
这可能是也可能不是最终的起始位置。
调节
- 参考传感器触发器应保持高电平,直到轴移离传感器。也就是说,在轴停止之前它不应跳闸并返回低电平。
- 确保传感器在激活后保持至少 10 毫米的高度。
- 如果参考传感器未在 10 毫米或 0.3937 英寸内恢复到低值,则会激活参考警报。
- 如果在减速阶段参考传感器切换为低电平,传感器将不会向后移动。
提取距离

设置基本位置

手动参考/丢失参考
为此,您必须移动到机器上一个特定的、可重复的位置,您希望将其称为起始位置。
- 这可以通过手动将 X、Y 和 Z 轴移动到预期位置并双击 Home 按钮来完成。
- 这包括失速启动,其中轴移动直到遇到物理障碍物停止以充当可重复位置,然后双击启动按钮将其设置为失速位置。
- 此方法不需要位置传感器。
- 要使用此方法,回零序列中的所有轴必须保持禁用状态。
- 每个轴都分配有起始位置的坐标
逐步设置 SEO
解决问题
如果您在启动过程中收到启动警报,则可能有多种原因需要您进行调查。
- 当传感器未激活时,确保所有参考传感器在 F1 屏幕上显示“低”。
- 确保参考传感器在被轴激活时变高。
- 如果您到达时轴缓慢向后移动 10 毫米并触发警报,而不是朝参考传感器移动,则说明您的参考传感器在 F1 页上设置为“高”,或者传感器有缺陷。
- 如果当轴绕传感器向后移动时收到参考警报,最可能的原因是轴减速超过 10 毫米。减少参考源可以解决这个问题。
- 如果您在启动轴时收到硬限位警报,则很可能您激活了启动传感器,然后将其传递到另一侧,传感器再次下降。在这种情况下,由于液位已经很低,因此无法将波追溯到传感器。尝试移除传感器将触发硬限位警报。传感器应保持高电平,直到轴远离参考传感器。确保传感器在激活后保持至少 10 毫米的高度。如果这不可能,降低参考速度或增加轴加速度也会有所帮助。
- 如果机器在启动后保持开启状态并闪烁但没有任何反应,最可能的原因是自动工具调零已启用但配置不正确。如果禁用自动工具清零可以修复本地化错误,但您安装了工具配置器,请检查工具配置器设置,因为这就是问题所在。
- 如果机器启动后停止并闪烁“归位”但没有任何反应,则您的机器上可能启用了换刀装置,但没有正确配置它。某些类型的刀库在参考序列期间返回到起始位置。将换刀装置切换至手动模式,直到完成换刀装置的安装。
- 如果机器在启动后继续显示归零和闪烁,另一个原因可能是软件限制问题。这可能是因为对刀仪超出了软限制,或者因为您为 Z 轴设置了软限制,从而阻止 Z 轴向 Z0 机器坐标移动。刀具移动前,Z 轴上升至 Z0。如果软限制阻止了这种情况,机器将停止并最终失效。确保所有轴软限位允许向刀具位置移动,并且 Z 轴可以向 Z0 移动,并且移动得足够远以接触刀具位置处的刀具。
- 如果您不确定如何连接参考传感器,请阅读我们的识别参考传感器的快速指南。
- 对于软件从轴,将正确的传感器分配给正确的电机非常重要,否则在定位从轴时会得到非常奇怪的结果。使用上面的归位视频中显示的技术来识别哪个从轴电机以及哪个传感器。不要假设它...