

 English
English  French
French  German
German  Simplified Chinese
Simplified Chinese Configuración del torno MASSO
Guía de inicio rápido Configuración del torno MASSO-G3
Estas notas se crearon para ayudar a los nuevos usuarios a configurar propiedades de configuración clave en MASSO.
Esta no es una guía de configuración completa, pero busca brindar orientación sobre la configuración. Algunos elementos deben configurarse en el orden correcto o no funcionarán como se esperaba. También señalará errores comunes y sugerencias para los usuarios nuevos. Entiendo que los usuarios desean ver que las cosas se muevan lo más rápido posible, pero generalmente ir despacio y con cuidado en pequeños pasos es mucho más rápido que apresurarse.
Esta guía no pretende mostrar cómo conectar los distintos hardware que conectará a MASSO.
Empezando
Para configurar MASSO primero necesita conectar un mínimo de los siguientes elementos: Fuente de alimentación, Monitor, Teclado y mouse. Lo ideal sería que también conectara su interruptor de parada, variadores, interruptores de límite, apagado automático y VFD, aunque puede conectarlos a medida que configura cada uno de estos componentes.
Descarga tu software
Fuerza
Tenga en cuenta que se debe conectar un fusible de 1 amperio en la alimentación de su fuente de alimentación en el MASSO G3. Un cortocircuito accidental de los terminales de alimentación auxiliar integrados en MASSO provocará daños en la placa principal si el fusible no está instalado.
Prácticas de trabajo seguras al cablear MASSO
Cargue su software
Siga las instrucciones en el siguiente enlace para cargar su software.
Sugerencia: la mayoría de las personas tienen problemas para cargar el software porque no presiona F1 repetidamente dentro de los primeros 4 segundos después de encender MASSO. Si la pantalla de carga del software no aparece en la pantalla, apáguela e inténtelo nuevamente.
Cargando software a las instrucciones MASSO G3
Cargando software en MASSO Touch Instrucción
Vídeo de recursos adicionales
Contraseña predeterminada
La contraseña de usuario y administrador predeterminada para MASSO es HTG.
Siga el enlace a continuación para ver cómo cambiar estas contraseñas.
Interruptor de parada
Un interruptor Estop es importante y MASSO no funcionará sin uno. Asegúrese de tener su Estop conectado.
Sugerencia: La forma en que esté cableado el interruptor de parada dependerá de si tiene un colgante o no.
ADVERTENCIA: El cableado de la parada de emergencia debe realizarse según las normas de seguridad de su país o región. MASSO pondrá la máquina en retención de avance y detendrá el husillo al presionar la parada de emergencia, pero todas las unidades y actuadores DEBEN desactivarse directamente mediante la señal de parada de emergencia del botón de parada de emergencia. La entrada de parada de emergencia de MASSO solo está diseñada para alertar al usuario que se ha presionado una parada de emergencia.
Sugerencia: Cuando se presiona Estop, el eje desacelerará hasta detenerse. Si desea una parada instantánea de sus unidades, deberá cablear el circuito de habilitación de la unidad a través de un contacto de relé de parada. Se proporciona una salida TTL llamada ES para permitirle conectar un relé TTL que se liberará cuando se presione Estop. Esto se puede utilizar para detener el hardware externo. p.ej. Deshabilitar VFD, deshabilitar unidades de motor, etc.
Vídeo de recursos adicionales
Cableado del eje
La forma de cablear sus motores dependerá del tipo de motores que tenga.
El siguiente enlace ofrece ejemplos de cableado para varios tipos de motores, paso a paso y servo.
https://docs.masso.com.au/wiring-and-setup/setup-and-calibration/axis-servo-stepper-examples
Vídeo de recursos adicionales
Configuración de ejes
Instrucciones de calibración de ejes
Distancia por revolución: qué distancia recorre su eje en una revolución del motor.
Pulsos por revolución: cuántos pasos necesitará su motor para completar 1 revolución
Avance máximo: Define la velocidad rápida de su eje.
Configuración de aceleración: determina qué tan rápido su eje acelera hasta la velocidad de avance elegida.
Mínimo de recorrido: este valor determina la extensión del recorrido del eje en la dirección negativa.
Máximo de recorrido: este valor determina la extensión del recorrido del eje en la dirección positiva.
Invertir dirección: si su eje viaja en la dirección incorrecta, marque esta casilla para invertirlo.
Contragolpe: Introduzca el contragolpe de su eje. Tenga en cuenta que no debe exceder los 10 mm o 0,3937”
Sugerencia: El mayor error que cometen los nuevos usuarios es ignorar la configuración de viaje máximo y mínimo. Si los deja en 0, su eje no se moverá ya que forman parte del sistema de límite suave de MASSO. Tenga en cuenta que deshabilitar los límites suaves en la configuración general solo los deshabilita durante el mecanizado, pero aún está sujeto a ellos cuando se trata de desplazar su eje. Se recomienda que ingrese valores máximos y mínimos muy grandes en su eje hasta que esté listo para configurarlos correctamente. De esa forma podrás trotar alrededor de tu eje sin toparte con un límite. El recorrido máximo DEBE ser mayor que el valor del recorrido mínimo o el eje se moverá en una sola dirección.
Comprender el sistema de coordenadas del torno
Es importante comprender el sistema de coordenadas del torno MASSO y cómo funciona con herramientas delanteras y traseras.
- El sistema de coordenadas de la máquina es fijo sin importar si su herramienta está montada en la parte delantera o trasera.
- Para ayudar con la configuración de las coordenadas de la máquina, MASSO G2, los ejes +X, -X, +Z y -Z están marcados en la pantalla. X0 está ubicado en el centro.
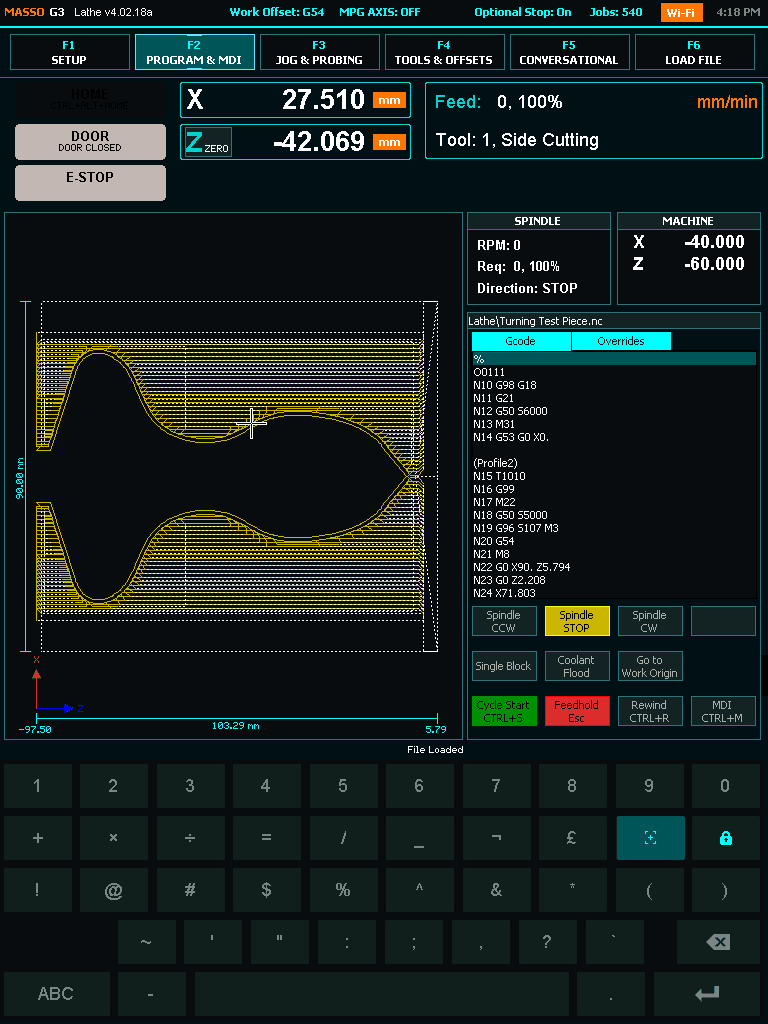
- No hay marcas en la pantalla G3, así que tenga en cuenta que Máquina +X está en la parte superior de la pantalla más alejada del operador, -X en la parte inferior de la pantalla más cercana al operador, -Z a la izquierda y +Z a la derecha. X0 está en el centro
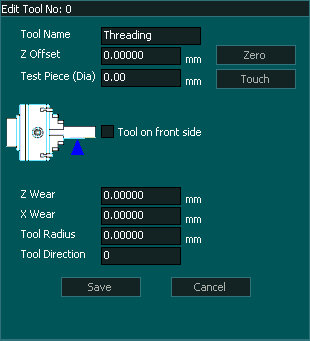
- Al definir su herramienta en la tabla de herramientas, debe especificar si la herramienta está montada en la parte delantera o trasera. Si la herramienta está montada en el frente, MASSO realizará automáticamente los cálculos de coordenadas de trabajo necesarios para mecanizar su pieza de trabajo correctamente. Esto significa que puede utilizar el mismo archivo Gcode para mecanizar con una herramienta montada tanto en la parte delantera como en la trasera.
- Las coordenadas de trabajo cambian dependiendo de si su herramienta está montada en la parte trasera o delantera. El eje Z siempre es -Z a la izquierda y +Z a la derecha. El eje X siempre es 0 en el centro. Para una herramienta montada en la parte delantera, + X está hacia el operador y para una herramienta montada en la parte trasera es +X hacia la parte trasera. MASSO gestiona la orientación del eje X dependiendo de si selecciona una herramienta montada en la parte delantera o trasera si la tabla de herramientas F4 se muestra a continuación. Se debe escribir Gcode para una herramienta montada en la parte trasera.
- Torno MASSO trabaja en modo diámetro
PRECAUCIÓN: Utilice un posprocesador diseñado para una herramienta montada en la parte trasera únicamente, independientemente de si su herramienta está montada en la parte delantera o trasera. De lo contrario, se producirán resultados no deseados.

Correr
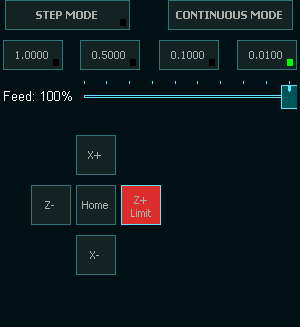
- Para mover su máquina debe estar en la pantalla de jogging F3.
- El desplazamiento se puede realizar en la pantalla F3 con el mouse, la pantalla táctil, el teclado o el colgante.
- Si no puede desplazarse, utilice el ratón para hacer clic en los botones de desplazamiento, ya que los usuarios han tenido problemas con teclados, colgantes y pantallas táctiles defectuosos en el pasado. Usar el mouse es la mejor prueba para hacer jogging.
Sugerencia: Si el Axis DRO no muestra movimiento, entonces el eje físico no se moverá. Verifique la configuración de su Eje arriba y especialmente sus valores de recorrido mínimo y máximo. Si alcanza un límite de viaje, el botón se volverá rojo y se mostrará la palabra Límite en el botón para informarle.
Sugerencia: Si su eje no se mueve verifique que no tenga un valor de 0 en ninguna de las siguientes configuraciones: Motor: Distancia por revolución, Accionamiento: Pulsos por revolución, Avance máximo o Aceleración. Dejar un valor de 0 en cualquiera de estos 4 parámetros en cualquier eje causará problemas. Si no está utilizando un eje, configúrelo con valores ficticios.
Colgante
No se requiere ninguna configuración de software para que el colgante MASSO MPG funcione. Simplemente conéctelo y funcionará. Para que el botón Estop del colgante funcione, debe conectar el Estop de acuerdo con las instrucciones de Estop según los enlaces a continuación. Una vez que el Estop esté conectado a través del colgante, al retirar el colgante se activará la alarma de parada de emergencia y deberá volver a enchufarlo para eliminar la condición de Estop.
Instrucciones de cableado del colgante MPG
Cableado de solo una parada e en las instrucciones del colgante MPG
Sugerencia: El mayor problema que tienen los nuevos usuarios con los colgantes proviene del uso de colgantes de terceros con MPG incompatibles integrados. Pueden parecer iguales pero internamente utilizan componentes diferentes. El Colgante MASSO se puede adquirir desde aquí: Colgante MASSO MPG
Consejo: MASSO no puede utilizar colgantes USB de ningún tipo.
Interruptores de referencia y configuración de la referencia
- Pueden ser sensores mecánicos, ópticos, magnéticos o de proximidad.
- Cada eje debe tener un interruptor de referencia que incluya un eje esclavo por software que se utiliza para el escuadrado automático.
- Lo único que todos tienen en común es que normalmente deben mostrar Bajo en la pantalla F1 y cambiar a Alto cuando se activan. Utilice la barra espaciadora para alternar la lógica de entrada si la suya está al revés.
Sugerencia: Si la velocidad de referencia es demasiado alta, el eje puede sobrepasar el sensor y no poder retroceder. Si el sensor no se puede borrar dentro de 10 mm o 3/8”, se indicará una alarma de localización.
Instrucciones de configuración de inicio
Vídeo de recursos adicionales
Límites estrictos
Las entradas de referencia se duplican como entradas de límite estricto después de que la máquina ha sido referenciada. Para funcionar, todos los interruptores de límite estricto deben estar fuera de la envolvente del recorrido del eje o el límite estricto se disparará antes de alcanzar el recorrido completo de su eje. Los límites suaves deben usarse primero y los límites estrictos como último recurso. Al disparar un límite estricto no se detendrá instantáneamente el eje, pero se desacelerará hasta detenerse. Los límites estrictos se pueden desactivar en la configuración general.
Sugerencia: si monta sus sensores/interruptor de referencia en el carro móvil y coloca un disparador en cada extremo del recorrido del eje, entonces solo un sensor/interruptor puede funcionar tanto para la referencia como para el disparo de límite estricto en cada extremo del recorrido del eje.
Límites suaves
- Configurar límites suaves es importante para evitar que su máquina falle debido al comando gcode que podría provocar un movimiento fuera de los límites físicos de su máquina.
- Si se configura incorrectamente, restringirá el desplazamiento de la máquina y, en casos extremos, impedirá que la máquina se mueva en absoluto.
Instrucciones de configuración de recorrido mínimo y máximo
Vídeo de recursos adicionales
Huso
Codificador de husillo
El codificador de husillo se utiliza para ciclos de roscado.
Lea y comprenda la información en la página del codificador de husillo. Presta especial atención a la frecuencia máxima permitida y mantente por debajo de este valor.
Puede encontrar información sobre la instalación de su codificador utilizando el siguiente enlace.